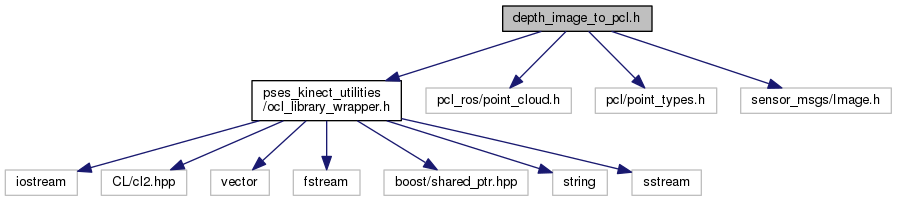
#include <pses_kinect_utilities/ocl_library_wrapper.h>#include <pcl_ros/point_cloud.h>#include <pcl/point_types.h>#include <sensor_msgs/Image.h>
Include dependency graph for depth_image_to_pcl.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pses_kinect_utilities::DepthImageToPCL |
| Class that make the implementation of the PointCloudXYZNodelet nodelet cleaner. More... | |
| struct | pses_kinect_utilities::MetaData |
| Contains some parameters and metada data of the camera. More... | |
| struct | pses_kinect_utilities::Transform |
| Contains the camera calibration. More... | |
Namespaces | |
| pses_kinect_utilities | |
| This namespace is used by the nodelets inside our package pses_kinect_utilities. | |
Typedefs | |
| typedef pcl::PointCloud< pcl::PointXYZ > | PointCloud |
| Shortcut for a XYZ Point cloud of the pcl library. More... | |
| typedef PointCloud::Ptr | PointCloudPtr |
| Shortcut for a pointer of a XYZ Point cloud of the pcl library. More... | |
Typedef Documentation
| pcl::PointCloud< pcl::PointXYZ > PointCloud |
Shortcut for a XYZ Point cloud of the pcl library.
Definition at line 20 of file depth_image_to_pcl.h.
| PointCloud::Ptr PointCloudPtr |
Shortcut for a pointer of a XYZ Point cloud of the pcl library.
Definition at line 26 of file depth_image_to_pcl.h.