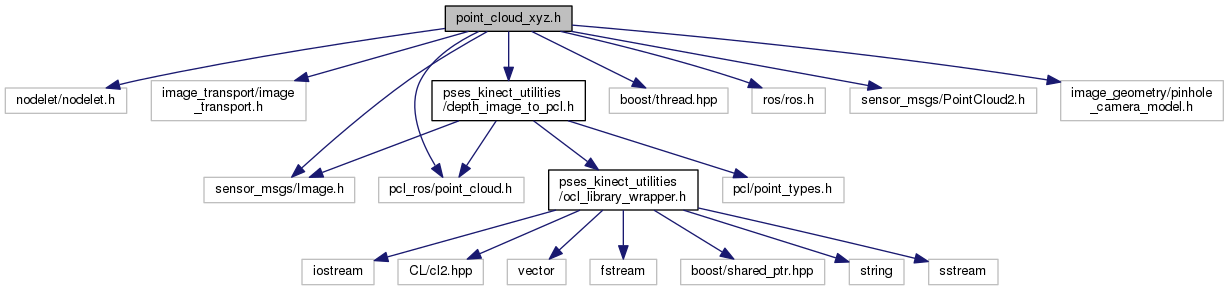
#include <nodelet/nodelet.h>#include <image_transport/image_transport.h>#include <sensor_msgs/Image.h>#include <boost/thread.hpp>#include <ros/ros.h>#include <pcl_ros/point_cloud.h>#include <pses_kinect_utilities/depth_image_to_pcl.h>#include <sensor_msgs/PointCloud2.h>#include <image_geometry/pinhole_camera_model.h>
Include dependency graph for point_cloud_xyz.h:
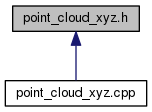
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pses_kinect_utilities::PointCloudXYZNodelet |
| Class of the PointCloudXYZNodelet nodelet, which converts a depth image into a point cloud containing x, y and z coordinates. More... | |
Namespaces | |
| pses_kinect_utilities | |
| This namespace is used by the nodelets inside our package pses_kinect_utilities. | |
Typedefs | |
| typedef std::shared_ptr< DepthImageToPCL > | pses_kinect_utilities::DepthConvPtr |
| Shortcut for a Pointer to a DepthImageToPCL Object. More... | |
| typedef sensor_msgs::PointCloud2 | PointCloudMsg |
| Shortcut for a PointCloud2 ROS message. More... | |
Typedef Documentation
| sensor_msgs::PointCloud2 PointCloudMsg |
Shortcut for a PointCloud2 ROS message.
Definition at line 25 of file point_cloud_xyz.h.